Image Denoising & Segmentation (TBD)
Goals
Implement a few simple denoising and segmentation algorithms.
Denoising
Estimate SNR in the image, and report these values.
from skimage import io
import matplotlib.pyplot as plt
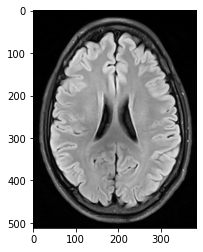
flair = io.imread('flair.png')
plt.imshow(flair, cmap='gray')
plt.show()
import numpy as np
def SNR(a):
a = np.asanyarray(a)
m = a.mean()
sd = a.std()
return np.where(sd == 0, 0, m/sd)
print(SNR(flair))
1.1576335871837644
Implement denoising techniques, apply them to the image. Show the noisy, denoised, and noisy minus denoised (method noise) image for the algorithm.
Bilateral filtering (TBD)
def bilateralFilter(image, sigmaS=int(20/2.87), sigmaR=23, sampleS=None, sampleR=None):
def fftconvolve3D(image, kernel):
def rfft(array, shape):
fft = np.fft.rfftn(array, s=shape)
return fft
def irfft(array):
ifft = np.fft.irfftn(array)
return ifft
def conv3D(array, kernel, shape):
conv = irfft(rfft(array, shape)*rfft(kernel, shape))
return conv
# fft method
shape = np.array(image.shape) + np.array(kernel.shape) - 1
cfft = conv3D(image, kernel, shape)
row, col, dep = np.array(kernel.shape) // 2
return cfft[row:-row, col:-col, dep:-dep]
def interp3D(input_array, indices):
'''Evaluate the input_array data at the indices given'''
output = np.empty(indices[0].shape)
x_indices, y_indices, z_indices = indices[0], indices[1], indices[2]
x0 = x_indices.astype(np.int32)
y0 = y_indices.astype(np.int32)
z0 = z_indices.astype(np.int32)
x1, y1, z1 = x0 + 1, y0 + 1, z0 + 1
#Check if xyz1 is beyond array boundary:
x1[x1==input_array.shape[0]] = x0.max()
y1[y1==input_array.shape[1]] = y0.max()
z1[z1==input_array.shape[2]] = z0.max()
x, y, z = x_indices - x0, y_indices - y0, z_indices - z0
output = (input_array[x0,y0,z0]*(1-x)*(1-y)*(1-z) +
input_array[x1,y0,z0]*x*(1-y)*(1-z) +
input_array[x0,y1,z0]*(1-x)*y*(1-z) +
input_array[x0,y0,z1]*(1-x)*(1-y)*z +
input_array[x1,y0,z1]*x*(1-y)*z +
input_array[x0,y1,z1]*(1-x)*y*z +
input_array[x1,y1,z0]*x*y*(1-z) +
input_array[x1,y1,z1]*x*y*z)
return output
height = image.shape[0]
width = image.shape[1]
sampleS = int(sigmaS/2.32) if sampleS is None else sampleS
sampleR = int(sigmaR/2.32) if sampleR is None else sampleR
imageFlat = image.flatten()
edgeMin = np.amin(imageFlat)
edgeMax = np.amax(imageFlat)
edgeDelta = edgeMax - edgeMin
derivedS = sigmaS / sampleS
derivedR = sigmaR / sampleR
paddingXY = np.round(2 * derivedS + 1)
paddingZ = np.round(2 * derivedR + 1)
# allocate 3D grid
sampleWidth = int(np.round((width - 1) / sampleS) + 1 + 2 * paddingXY)
sampleHeight = int(np.round((height - 1) / sampleS) + 1 + 2 * paddingXY)
sampleDepth = int(np.round(edgeDelta / sampleR) + 1 + 2 * paddingZ)
dataFlat = np.zeros(sampleHeight * sampleWidth * sampleDepth)
# compute downsampled indices
(yy, xx) = np.meshgrid(range(width), range(height))
dimX = np.around(xx / sampleS) + paddingXY
dimY = np.around(yy / sampleS) + paddingXY
dimZ = np.around((image - edgeMin) / sampleR) + paddingZ
# perform scatter
flatX = dimX.flatten()
flatY = dimY.flatten()
flatZ = dimZ.flatten()
dim = flatZ + flatY * sampleDepth + flatX * sampleWidth * sampleDepth
dim = np.array(dim, dtype=int)
dataFlat[dim] = imageFlat
data = dataFlat.reshape(sampleHeight, sampleWidth, sampleDepth)
weights = np.array(data, dtype=bool)
# make gaussian kernel
kernelDim = derivedS * 2 + 1
kernelDep = 2 * derivedR * 2 + 1
halfKernelDim = np.round(kernelDim / 2)
halfKernelDep = np.round(kernelDep / 2)
(gridX, gridY, gridZ) = np.meshgrid(range(int(kernelDim)),
range(int(kernelDim)),
range(int(kernelDep)))
gridX -= int(halfKernelDim)
gridY -= int(halfKernelDim)
gridZ -= int(halfKernelDep)
gridSqr = (gridX**2 + gridY**2) / derivedS**2 + gridZ**2 / derivedR**2
kernel = np.exp(-0.5 * gridSqr)
# convolve
blurData = fftconvolve3D(data, kernel)
blurWeights = fftconvolve3D(weights, kernel)
# avoid divide by 0
blurWeights[blurWeights == 0] = -2
# divide
normalBlurData = blurData / blurWeights
# put 0s where it's undefined
normalBlurData[blurWeights < -1] = 0
# upsample without rounding
dX = xx / sampleS + paddingXY
dY = yy / sampleS + paddingXY
dZ = (image - edgeMin) / sampleR + paddingZ
return interp3D(normalBlurData, (dX, dY, dZ))
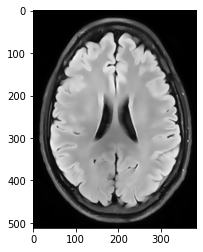
plt.imshow(flair_filt, cmap='gray')
plt.show()
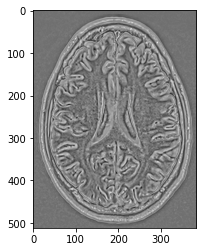
plt.imshow(flair-flair_filt, cmap='gray')
plt.show()